The design of the experimental setup. (a) Basler camera used grab
Four modes of the learnt appearance model for head tracking

An Open-Source Platform for Head-Fixed Operant and Consummatory
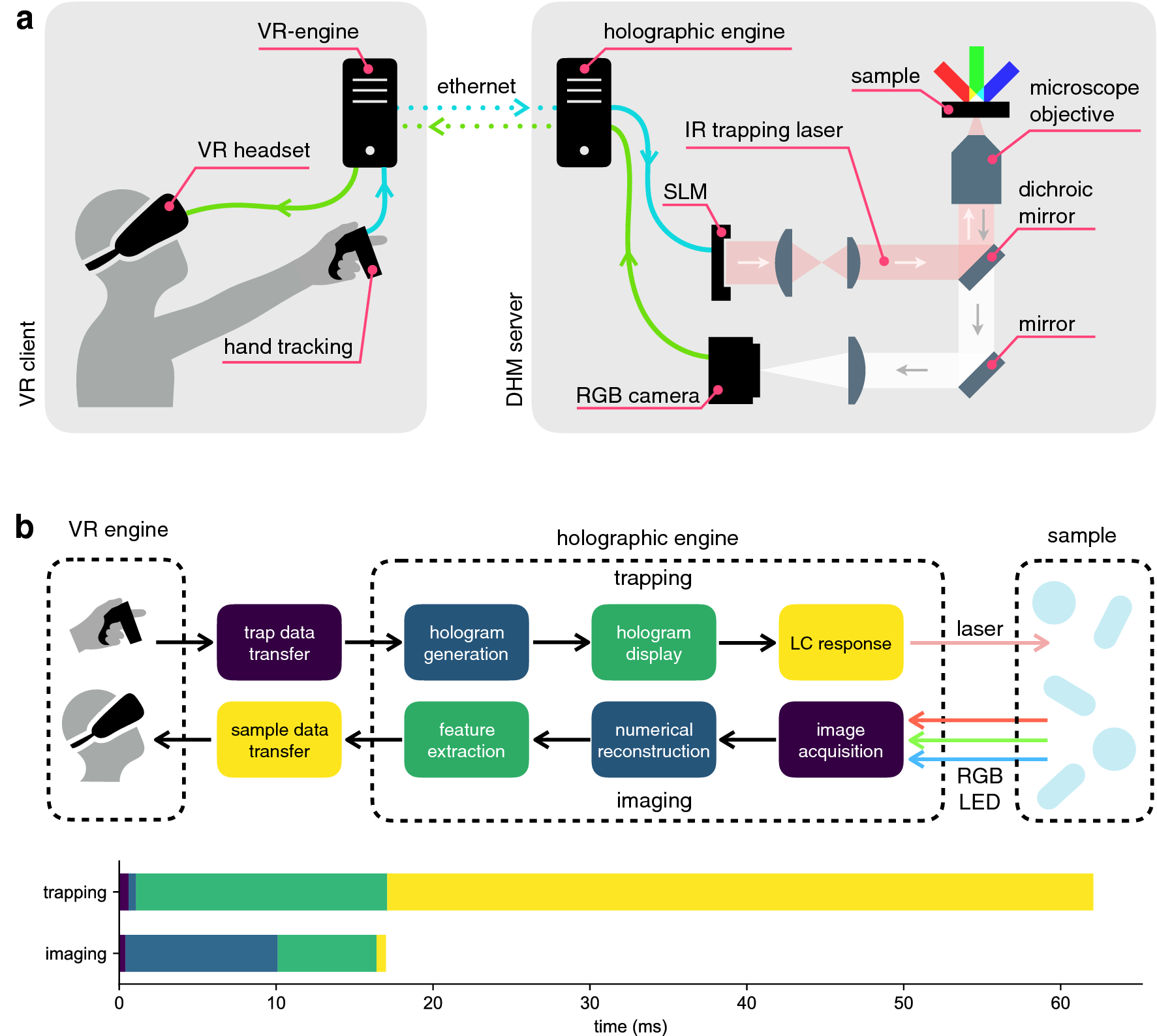
A virtual reality interface for the immersive manipulation of live
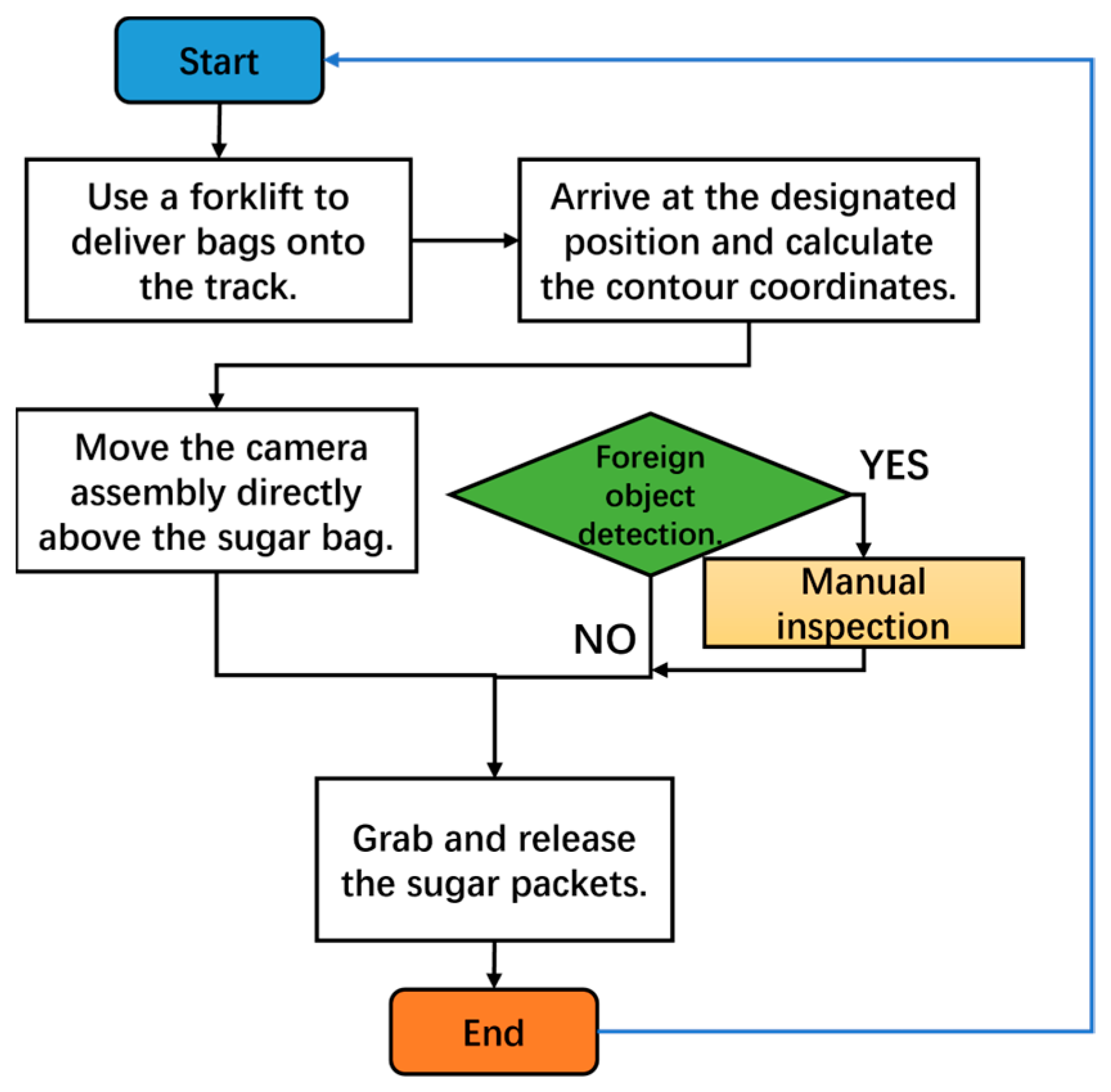
CMES, Free Full-Text

Cerebellum-dependent associative learning is not impaired in a

Panel A: RiBot lure used during the experiments. Panel B: Side and

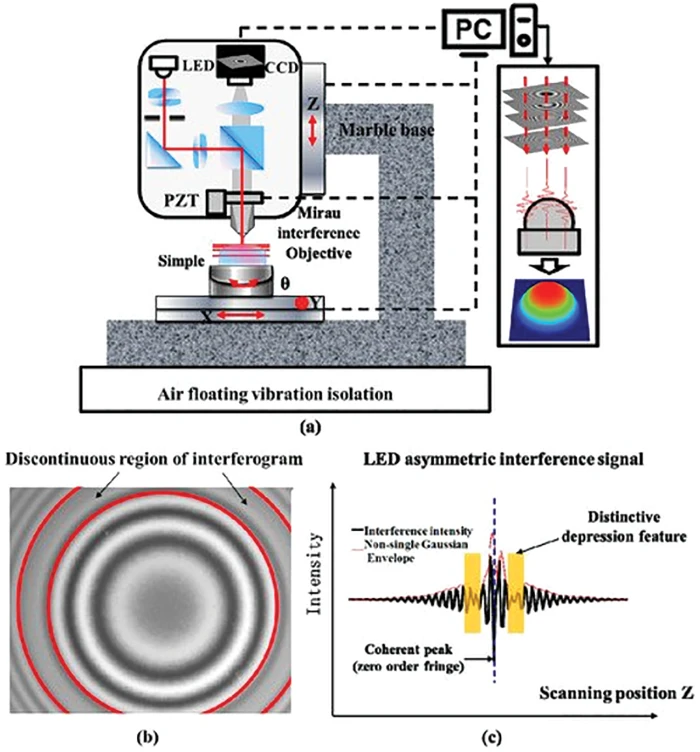
Application of CCD cameras as a versatile measurement tool for

Scalable Apparatus to Measure Posture and Locomotion (SAMPL): a

An inexpensive, high-precision, modular spherical treadmill setup

Investigating the vision-based intervertebral motion estimation of
Prototypical results from tracker running at between 20 and 25
Electronics, Free Full-Text

Using DeepLabCut for 3D markerless pose estimation across species

Image-based Autofocus Solution on Frame Grabber FPGA







